Projekt Pozdĺžne parkovanie
Ultrazvukový senzor na meranie vzdialenosti namontujeme na robota tak, aby sa díval nabok, nie dopredu.
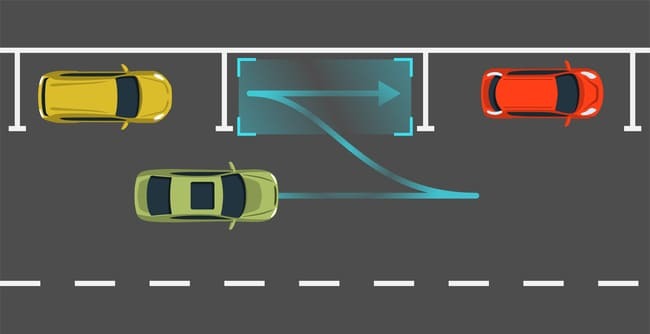
Vďaka tomu dokáže sledovať, či robot práve prechádza okolo nejakej steny, alebo voľného priestranstva - napríklad miesta, do ktorého by mohol
pozdĺžne zaparkovať. Najprv by však mal zmerať, či je medzera dostatočne veľká na to, aby sa do nej bezpečne zmestil a až potom
vykonať potrebné pohyby parkovacieho manévru. Náš robot to má jednoduchšie ako auto, pretože má diferenciálny podvozok (každé koleso riadené
samostatným motorom a oporná gulička, zatiaľ čo auto používa
Ackermannove riadenie, a tak je náročnosť tejto úlohy primeraná,
ale pekná variácia projektu je napodobnenie pohybov bežného auta pri pozdĺžnom parkovaní. Dôležité je ale v každom prípade využitie senzora.