Projekt Výpočet plochy pôdorysu krabice
V tomto projekte znovu využijeme ultrazvukový senzor na meranie vzdialenosti a namontujeme ho tak, aby sa díval smerom na bok (vľavo, či vpravo).
Robot sa rozbehne a sleduje, čo sa vedľa neho deje - najkôr by mal vidieť "prázdny priestor", až kým sa nepriblíži k prvému rohu krabice (začiatok strany A),
pokračuje ďalej pozdĺž krabice, až kým znovu neuvidí "prázdny priestor" - v tej chvíli prešiel okolo jednej strany obdĺžnikovej krabice a zistil tak
jej dĺžku. Robot sa potom otočí o 90 stupňov a zopakuje tento proces, aby zmeral dlžku strany B a napokon vypísal plochu obdĺžnikového pôdorysu krabice
v cm^2. Čo všetko na to potrebujeme?
Motory majú zabudované otáčkové senzory a teda pri pohybe robota vpred merajú jeho prejdenú vzdialenosť v stupňoch. My však vieme, že obvod modrých
koliesok je 17.5 cm, takže 360 stupňov zodpovedá práve tejto vzdialenosti (zvyšok je priama úmernosť...)
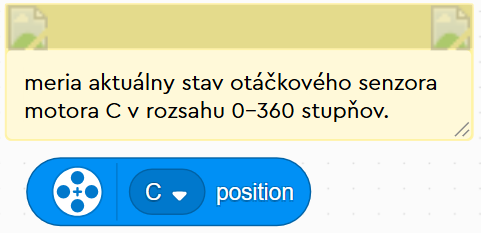
Využijeme premenné - ako bolo vysvetlené v predchádzajúcich projektoch, ale je tu ešte jeden detail - bežne sa počítadlo otáčkových senzorov
vynuluje vždy po dosiahnutí jednej otáčky - ukazuje stále iba 0-360 stupňov a vlastne zodpovedá tomu ako je motor otočený.
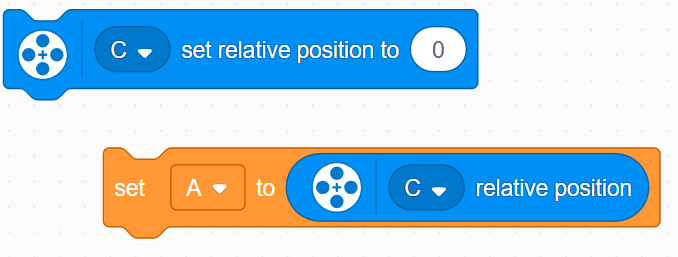
Existuje ale aj príkaz, ktorý meria skutočné otáčky (stále v stupňoch), teda po prejdení jednej otáčky sa nevynuluje, ale zväčšuje sa do nekonečna, resp.
v opačnom smere do mínus nekonečna. Na to si musíme pridať paletu príkazov "More motors" cez plus celkom vľavo dole pod všetkými paletami príkazov...
A potom môžeme použiť blok "relative position" - a keď sa nám hodí - napr. na začiatku strán krabice toto počítadlo vynulovať (je možné, že kvôli tomu treba
zastaviť pohyb robota).